
電腦J手記
今日,不少人都對於衛星導航技術習以為常,不過室內定位發展相對落後。不少人在超市要購物都會迷途。
目前定位以藍牙iBeacon 或者Wi-Fi,成本凖確度一般,Wi-Fi要在場所安裝3倍以上AP,成本驚人,誤差又大,iBeacon則近距離尚可,一旦離開信標較遠,或者藍牙訊號受干擾,位置就會「飄移」不定。
藍牙 v5.1版本終於加入定位新功能,成本比iBeacon更低,凖確性也更高,由於定位在物聯網應用好重要,中港臺不少初創都在開發類似應用,其實藍牙 v5.1 之前,藍牙有定位服務不過凖確性一般,無法在iBeacon距離較遠情況下準確估計。藍牙 v5.1以到達角 (AoA)/發射角 (AoD) 方向搜尋功能,位置定位精度更遠更凖,誤差數公分。
新一代藍牙功耗低,用於定位相對有利,本港有初創正開發。
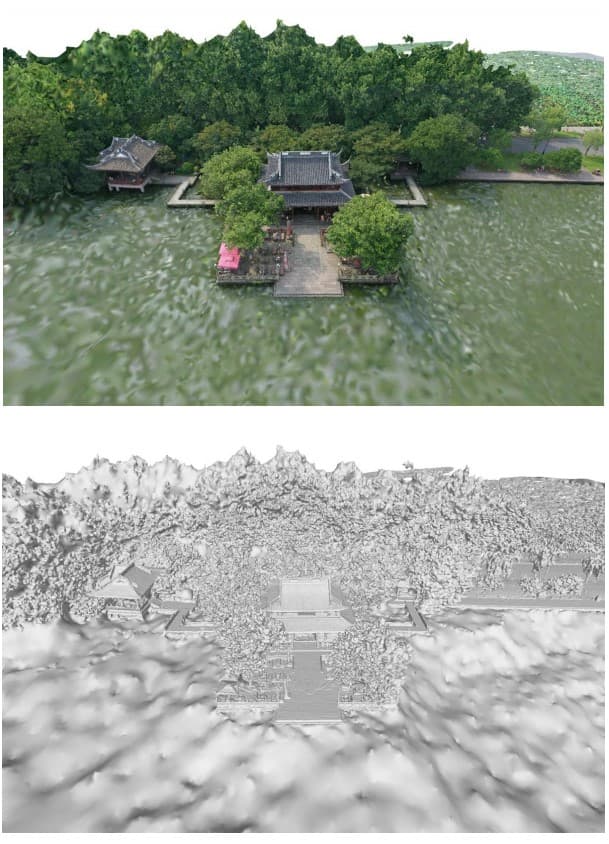
不過,本港獨角獸商湯以視覺運算,開發SenseMARS火星混合現實平台,毋須部署發射信標,直接用視覺以及電話,就可達到室內外精凖定位及AR導航,相當有趣,因為全部用圖片重構,所以毋須做。鐳射雷達雲點(Point Cloud),只要用大量照片學習,就可重構室內外3D。
以往室內場景定位,必須做大量地圖數據採集及製作,商湯呢人固方案由浙江大學─商湯科技三維視覺聯合實驗室合作開發,簡化高精度三維數碼地圖構建、可以跨平台和終端作空間感知計算、提供厘米級雲端空間定位,類似(Structure from Motion,SfM),以多幅照片運動重建3D,從無時間序列2D圖像推算3D信息,呢種技術經常用於電影,令圖片視覺有3D錯覺,但凖確度到可以用於跟蹤定位,則有相當難度。
商湯技術可支援Android/iOS/Web/微信小程序等,利用手機、平板電腦、AR/MR眼鏡等終端,在室內、室外建立AR/MR、導航和導覽,用途相當廣泛,目前有幾個導遊項目,正用SenseMARS。
以導航用途,首先構建高精度三維數碼地圖,然後基於視覺重定位及同時定位與地圖構建(Simultaneous localization and mapping ,SLAM)技術,就可用手機等實現連續精凖跟蹤。SLAM經常用於機器人,以光學鏡頭、雷射光達(LiDAR)、超聲波感測器,移動過程測定附近地圖特徵(牆角、柱子、傢俬等等)定位自身位置,根據位置增量式構建地圖,達到同時定位和地圖構建,因為LiDAR感測距離和精準度比較好,所以SLAM多類用LiDAR配合,商湯則用全景相機、慣性測量單元(IMU)感應器、GPS等採集,再融合重新建成地圖。
用戶手機拍攝圖像,APP分析圖像特徵與地圖資料中特徵,如果配合就同地圖作2D-3D對應,計算圖像相機位置,以手機IMU數據計算出6DoF,確定路標與拍攝圖像位置一致。類似定位對手機運算能力,要求相當高,商湯推出較簡單Web SLAM,甚至毋須安裝APP。
類似湯商技術,商場毋須安裝AP或者iBeacon,毋須供電及維護,擁有成本低,對於室內定位及路標服務,相當吸引。
上週末去中移動沙田馬場廂房,遇到唔少創新企業。中移動發掘5G商用,其中有以AI發展視覺運算,有一家叫smadt,專門以視像鏡頭蒐集商業數據,例如商場人流,亦研究利用遙距視覺運算控制機器人。